Comando Palmare Wireless Master zDCC
di Carlo Zamboni (12 ottobre 2004) |
| Copyright |
| Il seguente progetto (hardware & software) può essere realizzato liberamente,
ma non può essere commercializzato in nessun modo, salvo diversa indicazione da
parte dell'ideatore. Per ulteriori informazioni utilizzate il seguente indirizzo e-mail
info@dccworld.com. |
| |
| Premessa sul progetto |
Questo non vuole costituire "il" progetto, piuttosto un elemento
su cui basare spunti di discussione per futuri sviluppi visto anche il modo in cui
è nato, ovvero partendo da una esigenza minima: avere la possibilià
di seguire il convoglio lungo il percorso del plastico. E poi si sa... l'appetito
vien mangiando!
Un altro presupposto era quello di contenere i costi, sacrificando magari le prestazioni
ed utilizzare componenti facilmente reperibili sul mercato; ma anche per la fretta di veder
funzionare qualcosa.
Questa premessa lascia aperte tutte le possibilità di modifica e sviluppo.
In questa pagina viene descritta la realizzazione del Comando Palmare Wireless. |
| |

Foto Comando Palmare Wireless |
| |
| Funzionamento |
|
Sistema Ricetrasmettitore
Tra le varie possibilità di trasmettere e ricevere i segnali ho optato
per un sistema a radio frequenza e piuttosto che impegnare del tempo nello sviluppo
delle parti ad alta frequenza ho preferito scegliere dei moduli già preassemblati,
facilmente reperibili sul mercato; tra questi la mia scelta è caduta su moduli
AUREL (vedi lista componenti).
Il ricevitore non è canalizzato, ma funziona su di una frequenza fissa (circa 433 MHz)
disponibile per i telecomandi a bassa potenza. Per poter ricevere informazioni dai diversi
trasmettitori occorre che questi si attivino in sequenza, per evitare sovrapposizioni
di informazioni.
Un primo trasmettitore assume la funzione di master, e sarà dotato di sola
trasmittente, mentre gli slave (schiavi), per essere in grado di sincronizzarsi, dovranno
avere anche una ricevente a bordo; ho utilizzato un modulo ricetrasmittente sempre AUREL.
Per la sincronizzazione avevo pensato ad un sistema differente ma non mi sono fidato
della stabilità dei quarzi; sarebbe stata inoltre necessaria
una taratura di questi ultimi, con relativa strumentazione da adottare.
Qualora il master non sia in funzione, il software nel PIC slave
provvede a sostitituirsi a questo e ad iniziare comunque il proprio lavoro.
Le portate possono variare in funzione della "rumorosità" dell'ambiente
e delle antenne adottate: quella teorica è di 100 m. Io ho provato a fare esperimenti
in un raggio di una ventina di metri e non ho avuto problemi.
Trasmettitore Master
È costruito con il suddetto modulo trasmittente ed un PIC 16F628, che in sostanza
è una versione POTENZIATA (e meno costosa) del famoso 16F84 e può
quindi essere programmato (e riprogrammato) con gli stessi programmatori e software.
Un po' di pulsanti, un potenziometro qualche resistenza e qualche condensatore e
tutto è pronto!
Il circuito è alimentato direttamente da una pila da 9V; lo stabilizzatore
switching provvede ad abbassare la tensione ai 5V necessari ai componenti.
Si possono anche utilizzare 4 pile Ni-Cd (4,8v teorici) ma è necessario rimuovere
il MAX638 ed i relativi condensatori e induttanze. Sul PCB andranno ponticellati i fori
corrispondenti al pin 1 e 5 del MAX638.
In seguito alle misure di consumo dai noi effettuate, con una pila da 9V ricaricabile da
150 mAh si ha un autonomia di 75 ore.
L'antenna (di 17 cm) può essere realizzata sia con un tondino di ottone sia con un semplice
pezzo di filo e può essere alloggiata tranquillamente dentro la "scatola"
del trasmettitore stesso.
Una nota sugli switch BCD: esistono dei modelli con i diodi già già montati. Per
i modelli privi è possibile realizzare il piccolo PCB predisposto per il montaggio
dei diodi.
Trasmettitore Slave
Essenzialmente identico al trasmettitore master, differisce solo per
il modulo AUREL e per il software del pic. Il software differisce da quello
del master per le definizioni degli intervalli di trasmissione, mentre quelli
degli slave hanno ID diversi. |
| |
| Caratteristiche |
-
selezione di 99 indirizzi effettuata tramite commutatori digitali;
-
comando a 28 velocità (step), con potenziometro;
-
interruttore per la direzione (avanti/indietro);
-
comando di F0 (Luci), F1, F2, F3 e F4.
Questi comandi non sono memorizzati a livello di software quindi nella
realizzazione pratica la funzione FL (utilizzata per le luci) è
comandata da un interruttore mentre F1 può essere comandata o
da un interruttore o da un pulsante (in base alle proprie esigenze);
-
stop di emergenza;
-
pulsante seconda velocità: premendo questo pulsante viene inviato un
comando di velocità fissa (ma liberamente programmabile) alla locomotiva
comandata. Utile per avvicinarsi in stazione o fare manovre;
- frenata rapida.
|
| |
| Caratteristiche di funzionamento |
| seconda velocità: |
| Attivando l'interruttore della seconda velocità la locomotive procede ad
una determinata velocità (impostabile a piacere) ignorando la regolazione
del potenziometro. |
| Impostazione seconda velocità: |
- a trasmettitore spento si imposta sulle unità del
selettore di indirizzo la frazione di velocità desiderata. Per esempio
con 2 avremo la seconda velocità impostata al 20% della
velocità massima della locomotiva;
- si tiene premuto il pulsante F1 mentre si accende il trasmettitore;
- il led lampeggia (D2), si aspetta qualche secondo;
- si spegne il trasmettitore.
La velocità rimane memorizzata per i successivi utilizzi. Prima di riaccendere il
trasmettitore ricordarsi di impostare il corretto indirizzo della loco da comandare.
|
| Freno: |
| Impostando la seconda velocità a 0 il relativo tasto funziona da frenata
rapida. Questa funzione è utile per fermare i treni escludendo l'inerzia
(ad esempio per fermare un convoglio entro i marciapiedi di stazione). |
| |
| Scorrimento indirizzi: |
| Lo zDCC permette di poter comandare diverse loco (anche in movimento) dal medesimo
comando palmare. |
| Funzionamento: |
-
quando si decide di passare ad un altra loco quella
comandata al momento può essere sia ferma che in movimento;
- si imposta quindi un altro indirizzo;
- il led (D2) inizia a lampeggiare per un tempo fisso;
- mentre il LED lampeggia non vengono spediti i comandi, il
trasmettitore è in holding;
-
Scaduto il tempo, il led smette di lampeggiare; adesso la loco
eseguirà i comandi impartiti dal palmare.
Questa funzione è utile per poter passare da una loco ad un altra
senza interferire con altri indirizzi loco intermedi.
|
| Impostazione del tempo di holding: |
- a trasmettitore spento si imposta sulle decine del selettore di indirizzo il
tempo desiderato. Per esempio con 2 avremo un tempo di circa 2 secondi;
- si tiene premuto il pulsante F1 mentre si accende il trasmettitore;
- il led lampeggia (D2), si aspetta qualche secondo;
- si spegne il trasmettitore.
Il tempo di holding rimane memorizzato per i successivi utilizzi. Prima di riaccendere il
trasmettitore ricordarsi di impostare il corretto indirizzo della loco da comandare.
|
| |
| Stop di emergenza: |
| Ogni comando è munito di pulsante di stop di emergenza che, all'occorrenza,
permette di arrestare tutte le loco in movimento sul plastico. |
| Funzionamento: |
- si preme il pulsante di stop di emergenza;
- si accende il led (D2);
- tutte le loco si fermano e spengono le luci;
- per ripristinare il normale funzionamento premere di nuovo
lo stop di emergenza;
- il led si spegne e il sistema riprende il normale
funzionamento.
Questa funzione è utile per fermare tutto l'impianto in caso di
deragliamenti o incidenti sul tracciato. Inoltre è anche possibile
riattivare il booster in caso di corto circuito.
|
| |
| Risoluzione potenziometro: |
| Mediante il trimmer V2 possiamo regolare la risoluzione del potenziometro V1.
Ovvero possiamo scegliere di quanto ruotare il potenziometro V1 per ottenere la
variazione di uno step. |
| |
| Schema Elettrico |
| |
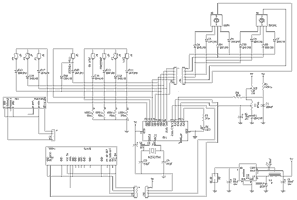
Schema Elettrico funzionante |
| |
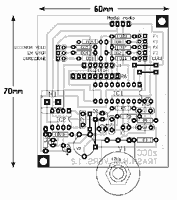
| Schema di Montaggio |
| |
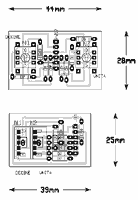
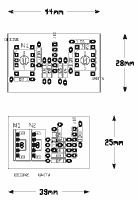
|
|
| Schema di montaggio del trasmettitore. |
| |
|
|
|
Schema di montaggio per i selettori BCD. Da realizzare nell caso in cui i
selettori non includano i diodi. I due tipi di PCB sono fatti per due formati
diversi di selettori, realizzate quello appropriato al selettore che avete acquistato. |
| |
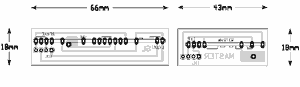
|
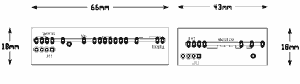
|
| Schema di montaggio per i "supporti" dei moduli AUREL (va utilizzato o il master o lo slave per ogni trasmettitore). |
| |
|
| |
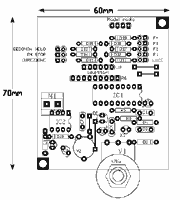
| Circuito Stampato |
| |
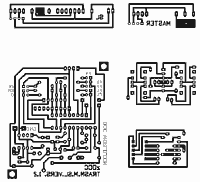
Circuito Stampato |
| |
| Elenco componenti |
| Resistenze: |
- V1 = 47 K potenziometro lineare;
- V2 = 100 K Trimmer;
- R3 = 330 K;
- R4 = 1K ;
- R5 = 1K;
- R2 = R6 = R7 = R8 = 100K (array di resistenze);
|
| Condensatori: |
- C1 = 0,1 µF poliestere;
- C2 = C5= 10 µF 16 v elettrolitico;
- C3 = C4 = 33 pF disco;
- C6 = 22 µF 16v elettrolitico;
- C7 = 0,1 µF poliestere;
- C8 = 100 µF;
|
| Induttanze: |
|
| Quarzi: |
|
| Integrati: |
- IC1 = PIC16F628;
- IC2 = MAX638;
|
| Diodi: |
- D2 = Diodo Led;
- D1 = D3-D19 = 1N4148 (vedi testo);
- D20 = 1N5817;
|
| Altro: |
- 6 interruttori (Direzione, Funzioni) unipolari;
- 1 pulsante normalmente aperto (stop di emergenza);
- 2 Switch BCD (commutatori digitali);
- M1 = Modulo Trasmettitore Aurel TX-433 SAW (per lo slave M2 = Ricetrasmettitore Aurel RTF-SAW 433);
- Antenna = filo di rame lungo 17 cm;
- Batteria da 9V;
- Connettore per batteria da 9V.
|
| |
| Software nel PIC16F628 |
| Per quanto riguarda il caricamento del software nel PIC
consultare questa pagina.
|
| Software "Master"
da inserire nel PIC16F628. |
| Software "Slave 1" da inserire
nel PIC16F628. |
| Software "Slave 2" da inserire nel PIC16F628. |
)
)
)
)
)
)
)
)